
SWIM: About Pages
Curious about what SWIM is all about? Please explore the short articles, written by SWIM Team Members covering various aspects of the datasets included in the search for subsurface water ice on Mars.
Follow us on Twitter!Article List
Lobate Debris Aprons (and friends): Martian Debris Covered Glaciers
By: Dr. Eric Petersen
Last Updated: 11/11/2020
Lobate debris aprons, lineated valley fill, and concentric crater fill are all Martian landforms that exhibit marks of possible glacier flow on their surface. These include compressional ridges (aligned concentric in the interior of craters) and lineations that resemble glacier moraines (Squyres, 1978). Their surfaces are mantled by debris however, with no evidence for water ice down to ~0.5 m depth (Boynton et al., 2002; Feldman et al., 2004). For this reason they have been compared to rock glaciers and debris-covered glaciers and have been earmarked as landforms with an interior likely to be rich in water ice. With thicknesses typically up to ~400 meters and horizontal dimensions of tens of kilometers, they are likely to contain vast reservoirs of ice.
Shallow Radar Sounding (SHARAD) allows us to penetrate the interior of these features; Holt et al. (2008) and Plaut et al. (2009) showed for targeted lobate debris aprons that the radar penetrates to their basal contact with bedrock and that their interior is made of high purity water ice. No contact was imaged between the surface debris layer and the ice-rich interior, with the favored interpretation being that the surface debris layer is thinner than SHARAD’s resolution—this constrains its thickness to between ~0.5–10 m. Petersen et al. (2018) extended this work to all lobate debris aprons, lineated valley fill, and concentric crater fill in the regions of Deuteronilus and Protonilus Mensae, confirming that these features are indeed debris-covered glaciers.

In the SWIM project we extended SHARAD surveying of candidate debris-covered glaciers across all of the broad survey swaths in the northern hemisphere and southern hemisphere below +1 km elevation. This includes all the major regions of interest for candidate glaciers, including the regions of Deuteronilus, Protonilus, and Nilosyrtis Mensae, the Phlegra Montes, Eastern Hellas, Southern Argyre, and the band of latitudes containing a large population of concentric crater fill (Levy et al., 2014).
Our work in Deuteronilus/Protonilus/Nilosyrtis Mensae expanded the survey coverage and number of SHARAD observations examined by Petersen et al. (2018), including new reflections under a large LDA in Nilosyrtis Mensae, and found a similar distribution of permittivity values, with a median ε’ = 3.0.

In Eastern Hellas we provide the first published region-wide survey of SHARAD data for candidate glaciers, expanding upon analysis by Holt et al., 2008 on SHARAD data for two Lobate Debris Aprons. While basal reflectors were nearly ubiquitous under Aprons, a number of features were plagued by radar clutter (see section on clutter below), preventing us from identifying real subsurface signals. Our permittivity estimation produced a distribution with a median ε’ = 2.9.
The region of Southern Argyre has a number of large lobate debris aprons with a geometry conducive to clutter-free observation with SHARAD; these features flow north from scarps associated with Argyre basin’s southern rim. In spite of the favorable geometry, no subsurface reflectors were identified in association with these features. Thus radar sounding is unable to provide evidence for or against the presence of ice.
Lobate debris aprons are also a major feature identified in geomorphic mapping work, where they are associated with a high confidence in the presence of water ice at depth. For more detail, see the About Section on geomorphic mapping.
Off-Nadir Clutter: The Bane of Orbital Radar Sounding
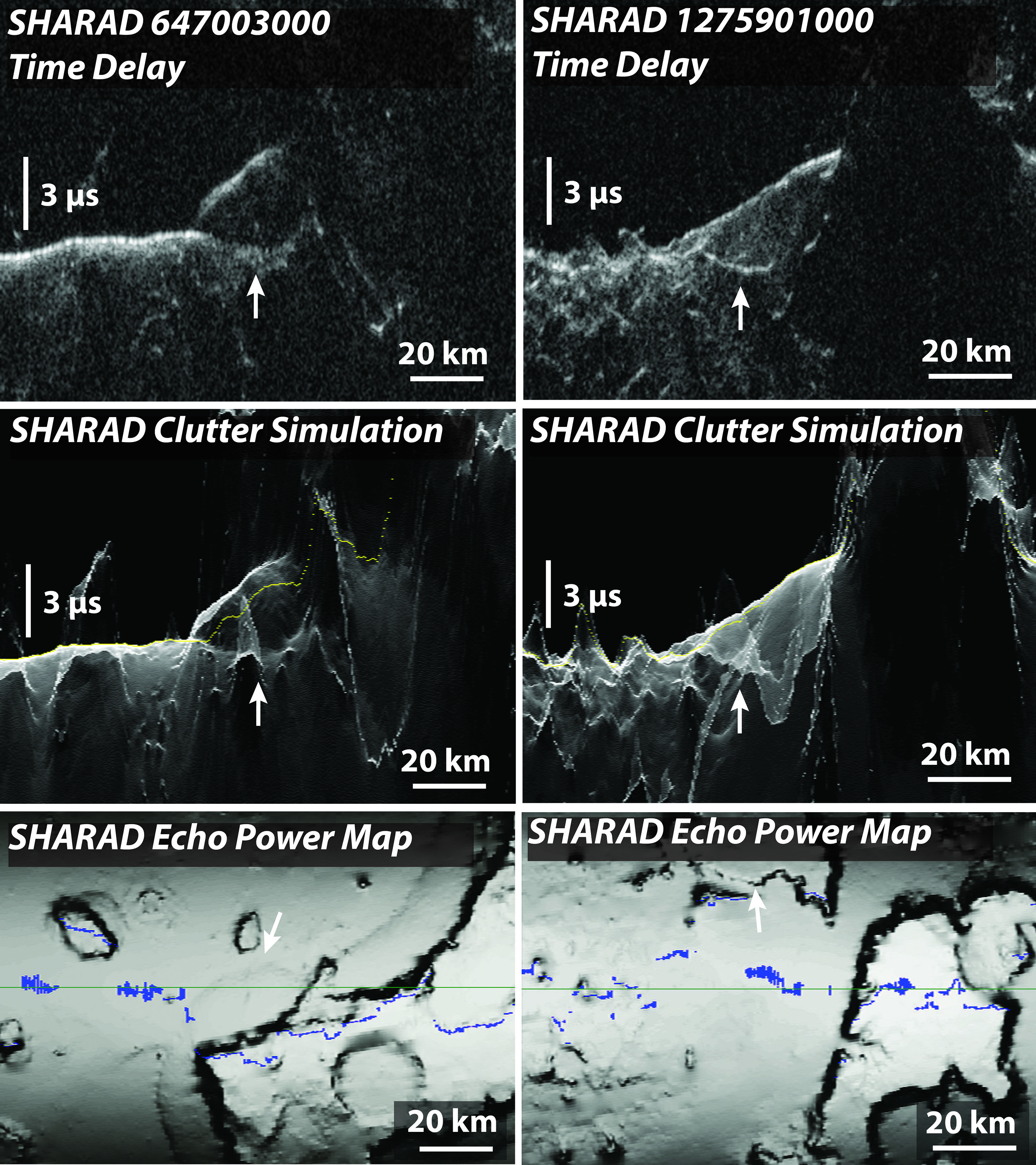
Because the Shallow Radar sounder (SHARAD) is operated on a spacecraft orbiting ~300 km above the surface of Mars, there is the possibility of strong surface reflections from planar surfaces far from the spacecraft’s nadir ground track. The increase in time delay from these reflections means they can appear in the data to be similar to reflections in the subsurface. We call such off-nadir surface reflections “clutter,” as they can clutter up the data, obscuring or masquerading as subsurface information. Clutter is not typically a problem in broad, flat plains but can be ubiquitous in high topography areas such as the dichotomy boundary regions. To disambiguate clutter from nadir subsurface returns we employ a clutter simulator which reproduces all surface returns SHARAD may see based on the MOLA (Mars Orbiter Laser Altimeter) global topography dataset (Choudhary et al., 2016). When interpreting SHARAD data for possible subsurface returns, the observed radar is compared to simulated clutter before mapping the subsurface (Figure 3).
For the SWIM project, clutter simulations have been produced for every radar observation in our study regions. These are called upon when needed for visual inspection of the radar data.